[tagline_box backgroundcolor=»#99cc00″ shadow=»yes» shadowopacity=»0.7″ border=»0px» bordercolor=»» highlightposition=»top» content_alignment=»left» link=»» linktarget=»_self» modal=»» button_size=»» button_shape=»» button_type=»» buttoncolor=»» button=»» title=»» description=»» margin_top=»» margin_bottom=»» animation_type=»0″ animation_direction=»down» animation_speed=»0.1″ class=»» id=»»]
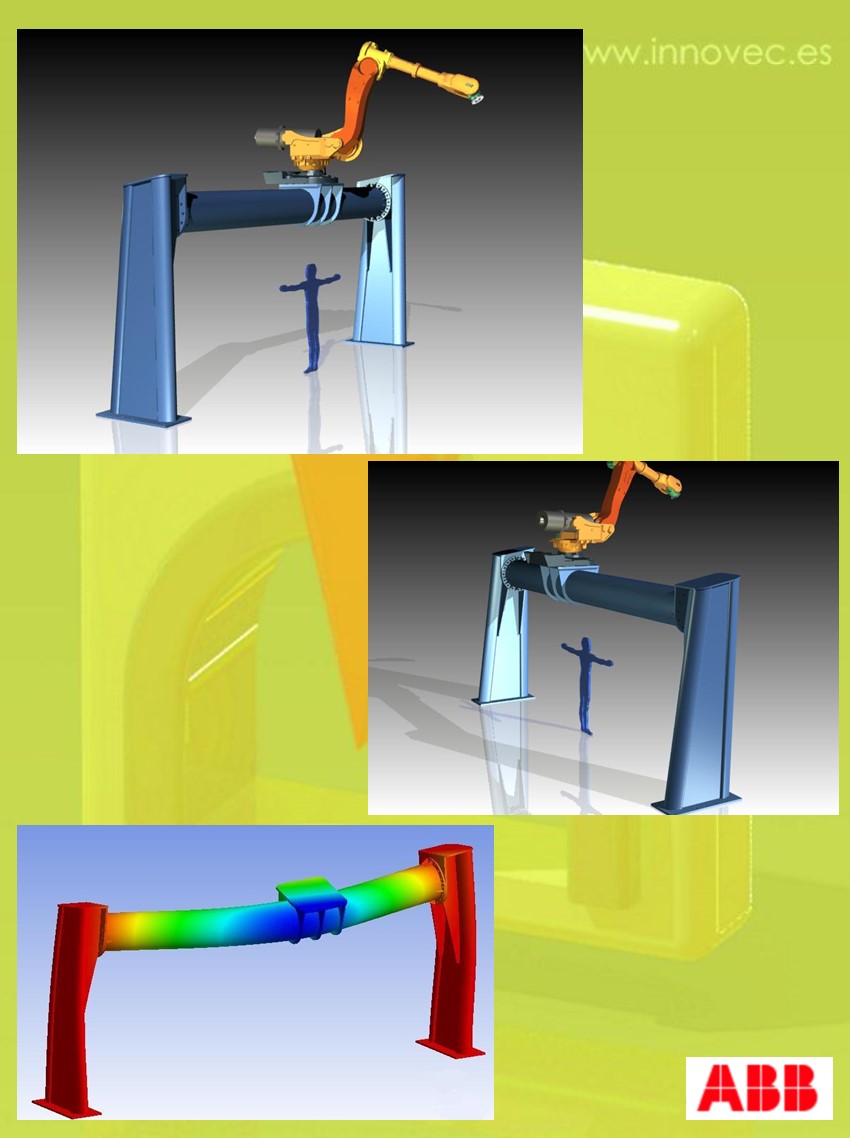
Diseño y análisis estructural de pórtico para robot manipulador de grandes dimensiones
[/tagline_box][one_half last=»no» spacing=»yes» center_content=»no» hide_on_mobile=»no» background_color=»» background_image=»» background_repeat=»no-repeat» background_position=»left top» border_size=»0px» border_color=»» border_style=»» padding=»» margin_top=»» margin_bottom=»» animation_type=»» animation_direction=»» animation_speed=»0.1″ class=»» id=»»]
Descripción del proyecto:
- Diseño de detalle del pórtico, definiendo los despieces a partir de chapas láser , oxicortes, y perfiles tubulares de acero soldados.
- Optimización de las soldaduras a efectuar, tanto desde el punto de vista resistente, como para reducir deformaciones permanentes debidas al proceso de soldadura.
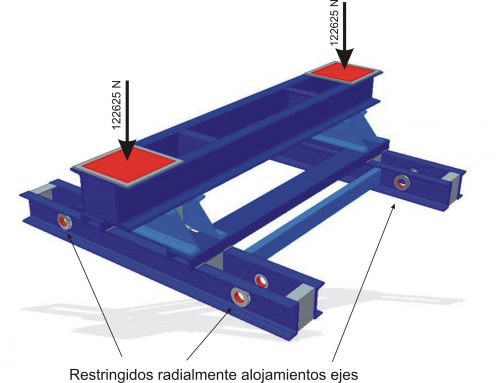
- Análisis de las reacciones estáticas y dinámicas provocadas por los movimientos del robot sobre el pórtico.
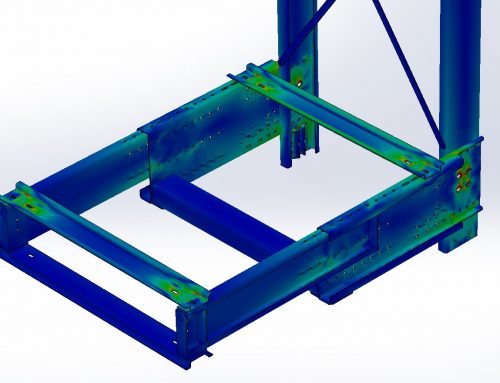
- Análisis tensional de los elementos del pórtico.
- Análisis de deformaciones y desplazamientos, estudiando la influencia que tienen en la precisión y repetibilidad de la pinza del robot.
- Análisis de la influencia de las variaciones de temperatura, al trabajar el robot en un entorno de hornos de templado.
- Apoyo en la fabricación del pórtico.
- Diseño de la cimentación y anclajes del pórtico.
Características del bastidor+robot:
[checklist icon=»fa-star» iconcolor=»#99cc00″ circle=»no» circlecolor=»» size=»13px» class=»» id=»»][li_item icon=»»]
Dimensiones del pórtico: 7.2 x 3.3 x 1.25 m [/li_item][li_item icon=»»]
Peso del pórtico: 4350 Kg[/li_item][li_item icon=»»]
Peso del robot: 2175 Kg[/li_item][li_item icon=»»]
Dimensiones del robot: Alcance 3500mm[/li_item][/checklist][/one_half][one_half last=»yes» spacing=»yes» center_content=»no» hide_on_mobile=»no» background_color=»» background_image=»» background_repeat=»no-repeat» background_position=»left top» border_size=»0px» border_color=»» border_style=»» padding=»» margin_top=»» margin_bottom=»» animation_type=»» animation_direction=»» animation_speed=»0.1″ class=»» id=»»][imageframe lightbox=»no» lightbox_image=»» style_type=»bottomshadow» bordercolor=»» bordersize=»0px» borderradius=»0″ stylecolor=»» align=»none» link=»» linktarget=»_self» animation_type=»0″ animation_direction=»down» animation_speed=»0.1″ hide_on_mobile=»no» class=»» id=»»]
[/imageframe][/one_half]